Underwater Scene Modeller (uSM)
I was responsible for the assembly and electric components of the Underwater Scene Modeller being used in 2011 as a sensor in the Pavilion Lake Research Project, an international, multi-disciplinary science and exploration project held in collaboration with NASA and the CSA.
The uSM instrument combines high resolution camera, high-intensity laser pointer, stereo and chlorophyll cameras, and LED lights. The instrument was mounted onto a manipulator of DeepWorker, a single person submersible, in order to gain information about the dominant mechanisms for microbialiate morphogenesis from the bottom of the lake. The uSM was designed to be operable both from within the submersible or by a scuba diver (in SCUBA mode). Because all components are required to be sealed within the enclosure of a rugged water-tight and pressure-tight casing, the interface had to be designed so that a scuba diver would be able to run various commands underwater. Magnetic sensors are used inside the instrument to capture the scuba diver's commands from a magnet inside his or her glove.
The results of this study were published in Oceans, 2012 conference proceedings titled: Underwater 3D Modelling and Photosynthetic Life Detection authored by P. Jasiobedzki, C Dimas, and D. Lim. Some of the images from this conference proceedings are shown below (all images are copyright MDA Space Missions).
The uSM instrument combines high resolution camera, high-intensity laser pointer, stereo and chlorophyll cameras, and LED lights. The instrument was mounted onto a manipulator of DeepWorker, a single person submersible, in order to gain information about the dominant mechanisms for microbialiate morphogenesis from the bottom of the lake. The uSM was designed to be operable both from within the submersible or by a scuba diver (in SCUBA mode). Because all components are required to be sealed within the enclosure of a rugged water-tight and pressure-tight casing, the interface had to be designed so that a scuba diver would be able to run various commands underwater. Magnetic sensors are used inside the instrument to capture the scuba diver's commands from a magnet inside his or her glove.
The results of this study were published in Oceans, 2012 conference proceedings titled: Underwater 3D Modelling and Photosynthetic Life Detection authored by P. Jasiobedzki, C Dimas, and D. Lim. Some of the images from this conference proceedings are shown below (all images are copyright MDA Space Missions).

Front of uSM: High-Res Camera, Laser Pointer, Stereo/Chlorophyll Camera, LED Lights
|

View of uSM Mounted onto DeepWorker Manipulator
|
View of uSM from inside DeepWorker
|

Operation of uSM in SCUBA Mode
|

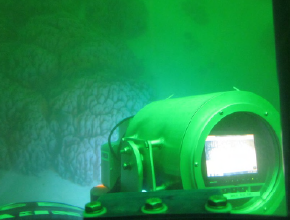
View of the LCD Display within uSM
|